Suchen und Sortieren
Das Suchen in Datenbeständen ist eine Routinearbeit beim Programmieren. Eng mit dem Suchen verwandt ist das Sortieren, denn normalerweise sortiert man ja Datensätze, um ein späteres Suchen zu erleichtern – entweder dem Programm oder dem Benutzer (wem das letzte nicht klar ist, der stelle sich bitte vor, die Einträge in Telefonbüchern wären nicht sortiert).
In der praktischen Anwendung müssen die unterschiedlichsten Datensätze sortiert werden. Das können z. B. einfach Strings sein, aber auch ganze Records, wie z. B. ein solcher:
type Person = record Name : String; Alter : Integer; end;
Im letzteren Fall muß man sich natürlich darüber im Klaren sein, welches Feld als Such- und Sortierschlüssel dienen soll – ob ich die Personen z. B. nach Name oder Alter sortieren will.
In den Beispielen auf dieser Seite, die auch mir manchmal als Referenz dienen, ging es mir darum, den jeweiligen Algorithmus deutlich sehen zu können. Daher werden einfach nur Zahlen sortiert; eine Anpassung an praktische Situationen ist leicht. Alternativ könnte man auch allgemeinere Suchwerkzeuge implementieren. Für beides habe ich am Ende kurze Beispiele geschrieben. Daher werden folgende globale Deklarationen, soweit nicht anders angegeben, vorausgesetzt:
const TableSize = 20; { oder ein anderer Wert } var Table : Array[1..TableSize] of Byte;
Der Array braucht (und kann) der Sortierfunktion also nicht als Parameter übergeben werden. Das ist unter normalen Umständen kein guter Stil, aber wie gesagt standen hier andere Gesichtspunkte im Vordergrund. Dazu, wie man es besser macht und welche Schwierigkeiten dabei auftreten, sind weiter unten auch einige Beispiele zu finden. Vollständige Programme zur Demonstration der Prozeduren und Funktionen sind an der jeweiligen Stelle im Text gelinkt.
Suchen in Tabellen
Der Standardfall. Wie in der Einleitung beschrieben, handelt es sich bei den Datensätzen, die durchsucht werden sollen, um Zahlen. Ein Array könnte beispielsweise so aussehen:
12 07 56 32 44 44 18
Wenn ich jetzt nach dem Schlüssel 56 suche, muß die Suchfunktion als Index 3 zurückgeben. Suche ich nach 44, könnte sie entweder 5 oder 6 zurückgeben. Manchmal ist es wichtig, das erste Vorkommen eines Schlüssel zu finden, in diesem Fall müßten wir auf 5 bestehen. Außerdem kann es natürlich sein, daß ein Schlüssel gar nicht gefunden wird. Die vorgestellten Funktionen signalisieren dies, indem sie den Index -1 zurückgeben.
Es gibt zwei wichtige Algorithmen, nämlich die lineare und die binäre Suche:
Lineare Suche
Wenn man nichts über die Anordnung der Elemente im Array weiß, – also z. B. ob sie vielleicht vorsortiert wären – bleibt einem nichts anderes übrig, als die Elemente eins nach dem anderen auszuprobieren, solange, bis man entweder das gesuchte Element gefunden hat, oder bis keine mehr da sind.
Um nun nicht jedesmal prüfen zu müssen, ob man schon am Ende des Arrays ist, wenden wir einen kleinen Trick an: Am Ende des Arrays fügen wir noch ein Element an, das genau dem gesuchten Wert entspricht – auf diese Weise wird dann jedesmal ein Wert gefunden. Natürlich muß anschließend geprüft werden, ob der gefundene Wert nun ein "echter" Treffer oder die eigene Endmarke war. Diese Endmarke wird übrigens "Sentinel" genannt, was vielleicht bei manchem C64-Veteranen Erinnerungen wach werden läßt :-)
Zu meiner Verlegenheit muß ich gestehen, daß dieser Trick mich veranlaßt hat, gleich im ersten Programm eine Ausnahme von der Regel zu machen – es soll die einzige bleiben. Denn die Variable Table ist hier wie folgt deklariert:
var Table : Array[1..TableSize + 1] of Byte;
Die Erweiterung dient natürlich zur Unterbringung des Sentinel. Die Funktion LinSearch bekommt als Parameter den Suchschlüssel und gibt den gefundenen Index zurück:
function LinSearch(Key : Byte) : LongInt; var Index : LongInt; begin Table[TableSize + 1] := Key; Index := 1; while Table[Index] <> Key do Inc(Index); if Index > TableSize then Index := -1; LinSearch := Index; end;
Wie man sieht, wird im ersten Schritt der Sentinel gesetzt, dann wird der Index auf 1 initialisiert und dann so lange erhöht, bis das Zeichen gefunden wurde. Zum Schluß wird noch geprüft, ob der Index außerhalb des gültigen Bereichs liegt, was ja darauf hinweist, daß der Sentinel die Suche abbrechen mußte. In diesem Fall wird der Index auf -1 korrigiert, denn das ist, wie oben vereinbart, der Wert für "nicht gefunden". Daß der Algorithmus stets das erste Vorkommen des Keys findet, ist wohl offensichtlich.
Wem der Sentinel unsympathisch ist (wie gesagt, es könnte da einige C64-Freaks geben), der kann ihn auch weglassen, muß dann aber die While-Zeile erweitern, um zu prüfen, ob der Array schon zu Ende ist.
Dies ist also das lineare Suchen (auch sequentielles Suchen genannt). Es genießt keinen allzu guten Ruf, aber das ändert wenig daran, daß auch dem cleversten Programmierer nichts anderes übrigbleibt, wenn ihm keine näheren Informationen über die Tabelle vorliegen.
Binäre Suche
Um die Suche zu beschleunigen, ist es vorteilhaft, wenn die Elemente in der Tabelle sortiert sind. Dies kann man entweder durch eines der unten beschriebenen Sortierverfahren erreichen, oder dadurch, daß man neue Elemente gleich an der richtigen Stelle einfügt. Beides benötigt zusätzlichen Aufwand, spart aber Zeit beim Suchen.
Wie nutzt man nun die Ordnung in der Tabelle aus? Man sucht sich einfach das mittlere Element der Tabelle und prüft, ob es größer oder kleiner als das gesuchte Element ist. Ist es größer oder gleich, braucht man nur noch in der unteren Hälfte der Tabelle zu suchen, ist es kleiner, nur noch in der oberen. Irgendwann ist die Größe des Suchbereichs auf 1 geschrumpft, und dann hat man das Element entweder gefunden, oder es ist nicht vorhanden.
Der folgende Algorthmus benutzt die Variablen L(inks) und R(echts), um den Suchbereich zu definieren, sowie Middle, um die Mitte zu markieren. Wollen wir oberhalb der Mitte weitersuchen, ziehen wir einfach L auf Middle + 1, wollen wir im unteren Teil weitersuchen, einfach R auf Middle:
function BinSearch(Key : Byte) : LongInt; var L, R : LongInt; Middle : LongInt; begin L := 1; R := TableSize + 1; while L < R do begin Middle := (L + R) div 2; if Table[Middle] < Key then L := Middle + 1 else R := Middle; end; if Table[R] = Key then BinSearch := R else BinSearch := -1; end;
Dieser Vorgang wird in der While-Schleife so lange wiederholt, bis L nicht mehr kleiner ist als R, was natürlich bedeutet L = R. Dann wird geprüft, ob das Element gefunden wurde, um ggf. -1 zurückzugeben.
Auffällig an diesem Algorithmus ist, daß er nicht besonders viel Wert darauf zu legen scheint, die Chancen zu ergreifen, die ihm das Schicksal vielleicht bietet. Genauer: Wenn er das gesuchte Element früher als erwartet findet (z. B. wenn es genau in der Mitte liegt), könnte er ja eigentlich abbrechen. Es ist kein Problem, den Algorithmus so zu verändern, daß er das tut, aber man verliert damit ein wichtiges Feature: Es ist dann nicht mehr garantiert, daß man das erste Vorkommen findet.
Textsuche
In diesem Abschnitt geht es nicht um Zahlen, sondern um Texte. Die Aufgabe besteht darin, einen kürzeren Text (auch "Muster" genannt) in einem längeren zu finden, also seine Position zu bestimmen. Der Text könnte z.B. lauten:
der bauer baut den bauernhof
Wenn ich jetzt das Muster 'bauernhof' suche, muß die Position 20 zurückgegeben werden; suche ich jedoch nur nach 'bau', wird dieses schon an Position 1 gefunden. Kommt das gesuchte Muster überhaupt nicht vor, muß dies irgendwie als Fehler signalisiert werden.
Einfache Mustersuche
Die erste Möglichkeit besteht darin, die Suche ganz einfach zu implementieren: Man startet an der ersten Position im Text, und schaut, ob das erste Zeichen mit dem ersten Zeichen des Musters übereinstimmt. Wenn ja, fährt man mit dem zweiten Zeichen fort usw., bis entweder das Ende des Musters erreicht ist (es also vollständig erkannt wurde), oder es zu einer Diskrepanz zwischen Muster und Text kommt. In dem Fall wird dann das gleiche ab Position 2 wiederholt usw, bis das Muster gefunden wird oder der Text erfolglos bis zum Ende durchsucht worden ist.
function Search(p, t : String) : LongInt; var Index, SubIndex : LongInt; begin Index := 0; SubIndex := 0; while (Index <= Length(t) - Length(p)) and (SubIndex < Length(p)) do begin SubIndex := 0; Inc(Index); while (SubIndex < Length(p)) and (t[Index + SubIndex] = p[SubIndex + 1]) do Inc(SubIndex); end; if SubIndex = Length(p) then Search := Index else Search := 0; end;
Zu beachten ist, daß der Maximalindex die Länge des Suchtextes abzüglich der Länge des Musters ist (aus naheliegenden Gründen). Daß dieser Such-Algorithmus nicht ideal ist, scheint irgendwie auf der Hand zu liegen. Dennoch kommt er häufig zum Einsatz, unter anderem (soweit ich weiß) in der Funktion Pos in Turbo-Pascal. Der Grund dafür ist, daß die Verbesserungen nicht gerade trivial sind und nicht ohne weiteren Speicher auskommen. Für einzelne Suchen (v. a. auf kurzen Texten) ist die einfache Variante auch vollkommen in Ordnung. Kritisch wird es erst, wenn die Suche sehr häufig ausgeführt wird, oder wenn die Texte sehr lang werden.
Unter pats.pas kann ein funktionierendes Programm heruntergeladen werden.
Boyer-Moore-Suche
Diesen Algorithmus haben sich die Herren Boyer und Moore ausgedacht, worauf auch der Name dezent anspielt. Er basiert auf der Idee, daß es eigentlich unsinnig ist, nach jedem Fehlschlag wieder ganz von vorne anfangen zu müssen. Wenn ich z. B. auf ein Zeichen treffe, daß überhaupt nicht im Muster vorkommt, brauche ich doch auch erst hinter dem Zeichen weiterzusuchen. Und kommt es vor, aber nicht an der momentan darunterliegenden Stelle, kann ich das Muster evtl. mehrere Stellen nach rechts verschieben.
Die Boyer-Moore-Suche geht dabei das Muster von rechts nach links durch. Wenn sie dabei auf ein ungleiches Zeichen im Text trifft, gibt es drei verschiedene Möglichkeiten:
Das Zeichen kommt im Muster gar nicht vor. In diesem Fall kann das Muster bis hinter dieses Zeichen nach rechts verschoben werden.
Das Zeichen steht weiter vorne im Muster (betrachtet wird sein letztes Vorkommen im Muster). In diesem Fall können wir das Muster so weit nach rechts verschieben, daß das Zeichen im Muster unter dem richtigen Zeichen im Text steht.
Das Zeichen steht weiter hinten im Muster. In diesem Fall können wir lediglich das Muster um 1 nach rechts schieben.
Anschließend wird das Muster erneut von hinten nach vorne durchsucht. Das wird so lange gemacht, bis entweder das Muster am Ende des Textes angekommen ist (ohne daß es gefunden wurde), oder die Überprüfung erfolgreich bis zum Anfang des Musters durchgekommen ist (es also gefunden wurde).
Es bleibt nun noch die Frage, wie man effizient die letze Position eines Zeichens im Muster findet. Dies geschieht üblicherweise über eine Tabelle, in der zu jedem Zeichen einmal die entsprechende Position eingetragen wird, und dann später nur noch nachgeschaut wird. Das Eintragen kann in einem simplen Durchgang erfolgen, von vorne nach hinten, wobei ein Vorkommen eines Zeichens das jeweils vorige Vorkommen überschreibt. Die Position -1 steht für "nicht vorhanden".
function BMSearch(Pat, Txt : String) : LongInt; var PosTable : Array[0..255] of LongInt; PatLen : LongInt; TxtLen : LongInt; Index : LongInt; PatIndex : LongInt; Position : LongInt; b : Byte; begin if Pat = '' then begin BMSearch := 0; exit; end; PatLen := Length(Pat); TxtLen := Length(Txt); for b := 0 to 255 do PosTable[b] := -1; for PatIndex := 1 to PatLen do PosTable[Ord(Pat[PatIndex])] := PatIndex; Index := 0; while (PatIndex > 0) and (Index <= TxtLen - PatLen) do begin PatIndex := PatLen; while (Pat[PatIndex] = Txt[Index + PatIndex]) and (PatIndex > 0) do Dec(PatIndex); if PatIndex > 0 then begin Position := PosTable[Ord(Txt[Index + PatIndex])]; if Position = -1 then Inc(Index,PatIndex) else if Position > PatIndex then Inc(Index,1) else Inc(Index,PatIndex - Position); end; end; if PatIndex = 0 then BMSearch := Index + 1 else BMSearch := 0; end;
In genau dieser Form kommt der Algorithmus z. B. im Bastisoft Pascal-Syntax-Highlighter (PSH) zum Einsatz, mit dem u. a. diese Seite formatiert wurde. Es gibt auch noch verbesserte Versionen; dieser sollte jedoch für die meisten Fälle ausreichen.
Der vollständige Quelltext ist hier zu finden.
Sortieren
Die Problemstellung ist einfach und klar definiert: Gegeben ist ein Array mit Elementen, die nach ihrem Schlüssel sortiert werden können, über deren momentane Anordnung jedoch nichts bekannt ist (das heißt natürlich auch, daß sie theoretisch schon sortiert sein könnten, oder genau in der umgekehrten Reihenfolge vorliegen könnten). Der Sortieralgorithmus soll die Elemente in die richtige Reihenfolge bringen.
Eine einfache Frage, viele Antworten:
Bubblesort
Bubblesort ist einer der simpelsten Sortieralgorithmen. Die Idee dahinter ist die folgende: Im ersten Durchgang wird der Array vom Ende bis zum Anfang durchgegangen und in jedem Schritt das aktuelle Element mit dem nächsten verglichen. Ist das hintere kleiner, werden die beiden vertauscht, so daß größere Elemente am Weg liegenbleiben und das jeweils kleinste weiter nach vorn wandert. Am Anfang angekommen, liegt das kleinste Element des Arrays an Position 1, wo es auch hinsoll.
Im nächsten Durchlauf wird dann das zweitkleinste Element gesucht und nach vorne durchgereicht. Logischerweise muß dieser Durchlauf nicht ganz bis zum Anfang gehen, sondern nur bis Index 2. Im dritten Durchlauf braucht nur bis Index 3 gegangen zu werden usw, bis das Verfahren abgeschlossen ist.
Man kann sich vorstellen, daß die kleineren Elemente "leichter" sind und daher aufsteigen wie Blasen – daher der Name Bubblesort. Ohne weitere Umschweife hier der Algorithmus:
procedure BubSort; var Run : LongInt; Index : LongInt; x : Byte; begin for Run := 2 to TableSize - 1 do for Index := TableSize downto Run do if Table[Index] < Table[Index - 1] then begin x := Table[Index]; Table[Index] := Table[Index - 1]; Table[Index - 1] := x; end; end;
Deutlich zu erkennen ist der Vertauschungsvorgang, bei dem das "untere" Element zunächst in der Variablen x zwischengespeichert wird, dann den Wert des "oberen" zugewiesen bekommt und anschließend x im "oberen" Index gespeichert wird.
Bubblesort genießt keinen besonders guten Ruf, weil es sehr langsam ist. Trotzdem gehört es zu denjenigen Algorithmen, die man häufiger antrifft, nicht zuletzt wegen seines hohen Bekanntheitsgrades. Hat man nur kleine Arrays zu sortieren (z. B. 20 bis 50 Elemente), schlägt es sich in der Regel auch ganz wacker; für größere Arrays hingegen ist es nicht zu empfehlen. Ich habe mir vorgenommen, auf dieser Seite vollkommen auf Komplexitätsanalysen zu verzichten, wenn es jemanden interessiert – die Literatur quillt über davon :-)
Selectionsort
Selectionsort ist ebenfalls ein sehr einfacher Algorithmus. Das Prinzip hinter dem "Sortieren durch Auswählen" besteht darin, daß der Array von vorn nach hinten durchgegangen wird, und für jeden Platz das passende Element herausgesucht wird.
Als erstes betrachtet man also das Element am Index 1. Man geht dann den Array Element für Element durch und merkt sich, welches das kleinste ist. Dieses vertauscht man dann mit dem ersten, so daß ganz vorne das kleinste Element steht. Im nächsten Durchgang betrachtet man den Index 2, durchsucht wiederum den Array nach dem kleinsten Element, wobei natürlich der Index 1 außen vor bleibt, und setzt das kleinste an den Index 2. Im 3. Durchgang bleiben dann die ersten beiden Elemente außen vor usw. So geht es immer weiter, bis man schließlich das vorletzte Element korrekt besetzt hat. Aus naheliegenden Gründen stimmt das letzte Element dann schon...
In Pascal sieht das ganze so aus:
procedure SelSort; var Elem : LongInt; Index : LongInt; Smallest : Byte; SmallInd : LongInt; begin for Elem := 1 to TableSize - 1 do begin SmallInd := Elem; Smallest := Table[SmallInd]; for Index := Elem + 1 to TableSize do begin if Table[Index] < Smallest then begin Smallest := Table[Index]; SmallInd := Index; end; end; if SmallInd <> Elem then begin Table[SmallInd] := Table[Elem]; Table[Elem] := Smallest; end; end; end;
In der Variablen Smallest merkt sich der Algorithmus die Größe des bislang kleinsten Elementes, in SmallInd seine Position. Beide werden zunächst auf Elem initialisiert, d. h. auf die Position, die besetzt werden soll. Dann wird der übrige Array durchsucht, und wenn ein kleineres Element auftaucht, werden die beiden aktualisiert.
Zwei Besonderheiten sind beim Vertauschungsvorgang zu betrachten: Zum einen wird er nur ausgeführt, wenn tatsächlich eine neue Position gefunden wurde; zum anderen benötigen wir keinen Zwischenspeicher, weil der Wert des neuen Elementes ja noch in Smallest steht.
Selectionsort ist schneller als Bubblesort, – im allgemeinen kann man vom Faktor 2 ausgehen – für größere Arrays jedoch auch nicht besonders gut geeignet.
Insertionsort
Insertionsort steht für "Sortieren durch Einfügen". Die Idee, die dem zugrunde liegt, ist einfach: Ein Teil am Anfang des Arrays, so wird angenommen, ist schon sortiert (zu Beginn ist dieser Teil natürlich 0 Elemente groß!). Nun wird das erste Element aus dem unsortierten Teil genommen und an der richtigen Stelle in den sortierten Teil eingefügt. Der sortierte Teil wächst dabei natürlich um ein Element, bleibt aber sortiert, wohingegen der unsortierte Teil um ein Element schrumpft.
Unser Algorithmus fängt also beim ersten Element an und geht dann bis zum letzten durch. Für jedes Element macht er nun folgendes: Von seiner Position aus bewegt er sich zum Anfang hin, solange die Elemente – wir sind ja im sortierten Teil – noch größer oder gleich dem in Frage stehenden Element sind. Dabei schiebt er jedes Element, daß er überquert, eins nach hinten, so daß er immer eine Lücke vor sich herschiebt. Findet er dann einen kleineren Kandidaten, schiebt er die Lücke nicht weiter, sondern setzt sein Element hinein. Auf diese Weise verbindet der Algorithmus die Suche nach der richtigen Position mit dem Verschieben der darüberliegenden Elemente.
procedure InsSortLinear; var Elem : LongInt; x : Byte; Index : LongInt; begin for Elem := 2 to TableSize do begin x := Table[Elem]; Index := Elem; while (Index > 1) and (Table[Index - 1] >= x) do begin Table[Index] := Table[Index - 1]; Dec(Index); end; Table[Index] := x; end; end;
Wie man sieht, wird das Element zunächst in x gespeichert. Dann beginnt das Verschieben, bis entweder ein Element gefunden wird, das kleiner als x ist, oder bis man bei Index 1 angelangt ist. Im letzteren Fall hat man offenbar kein kleineres Element im sortierten Teil und plaziert das Element an Position 1.
Um die richtige Position zu finden, verwendet diese Version von Insertionsort eine lineare Suche. Da liegt die Idee nicht fern, das Verfahren dadurch zu beschleunigen, daß man eine binäre Suche verwendet. Das Verschieben der "dahinterliegenden" Elemente muß dann gesondert erledigt werden.
procedure InsSortBinary; var Elem : LongInt; L, R : LongInt; Middle : LongInt; Index : LongInt; x : Byte; begin for Elem := 2 to TableSize do begin x := Table[Elem]; L := 1; R := Elem; while L < R do begin Middle := (L + R) div 2; if Table[Middle] > x then R := Middle else if Table[Middle] < x then L := Middle + 1 else R := L; end; for Index := Elem downto L + 1 do Table[Index] := Table[Index - 1]; Table[L] := x; end; end;
Auch in dieser verbesserten Version ist Insertionsort leider nicht unbedingt der Überflieger. Zwar ist es das schnellste der "langsamen" Verfahren, bleibt aber hinter den schnelleren Algorithmen deutlich zurück.
Shellsort
Für die einen stellt Shellsort den idealen Kompromiß aus Einfachheit und Geschwindigkeit dar, für die anderen ist es uninteressant, weil schnellere Verfahren längst bekannt sind. Der einzige nach seinem Erfinder benannte Sortieralgorithmus hat jedenfalls nach wie vor eine große Anhängerschaft.
Die Idee ist folgende: Der Array wird zunächst in mehrere Gruppen aufgeteilt, die dadurch festgelegt werden, daß zwischen ihren Mitgliedern der gleiche Abstand besteht. Angenommen, man verwendet den Abstand 3, dann gehören die Elemente 1, 4, 7, ... in eine Gruppe, genauso 2, 5, 8, ... und 3, 6, 9, ... Diese Gruppen werden nun einzeln sortiert, dann wird der Abstand verringert und die Vorgehensweise wiederholt. Das macht man so lange, bis der Abstand 1 ist, so daß im letzten Schritt gar keine Unterteilung mehr stattfindet.
Es stellt sich die Frage, nach welcher Methode die Gruppen sortiert werden. Die Anwort ist Bubblesort nicht unähnlich, jedoch etwas schlecht zu erkennen. Für jeden Schritt gibt die Variable Gap den Abstand zwischen den Elementen an. Die Variable Index läuft alsdann von Gap + 1 bis zum hinteren Ende der Tabelle durch. Für jeden Wert von Index wird ein Sortierlauf gestartet, mit Index als oberer Grenze – welche Gruppe dabei sortiert wird, hängt also von Index ab. Die Variable j wird auf das nächstkleinere Element der Gruppe initialisiert (also Index - Gap), dann wird es mit dem nächsthöheren verglichen und ggf. vertauscht. Dann geht j wieder einen Schritt nach unten (Schrittweite Gap), usw., bis j < 0 ist.
Wenn Index das n. Element einer Gruppe zu fassen hat, sind also alle Elemente (dieser Gruppe) unterhalb dessen sortiert. Ist Index bis zum Ende durchgelaufen, sind alle Gruppen sortiert. Fragt sich nur noch, nach welchen Regeln der Abstand verringert werden soll. Im Beispiel unten wird er immer halbiert; es hat sich jedoch in Messungen ergeben, daß Shellsort schneller ist, wenn die Abstände immer ungerade sind (warum weiß der Himmel), wofür man ja sehr leicht sorgen kann. Die Schrittweiten wären dann z. B. 63, 31, 15, 7, 3, 1.
Einfacher zu verstehen als alle umständlichen Erklärungen ist wahrscheinlich der Pascal-Quelltext selbst:
procedure ShlSort; var Gap : LongInt; x : LongInt; Index : LongInt; j : LongInt; begin Gap := TableSize div GapDivisor; while Gap > 0 do begin for Index := Gap + 1 to TableSize do begin j := Index - Gap; while j > 0 do begin if Table[j] <= Table[j + Gap] then j := 0 else begin x := Table[j]; Table[j] := Table[j + Gap]; Table[j + Gap] := x; end; Dec(j,Gap); end; end; Gap := Gap div GapDivisor; end; end;
Shellsort legt eine bemerkenswerte Geschwindigkeit an den Tag, so daß man es schon fast zu den "schnellen" Algorithmen zählen könnte. Leider kommt es mit sehr großen Arrays überhaupt nicht zurecht – heutzutage könnte man sagen, es skaliert schlecht (Vorsicht, Bastard Anglizismus from Hell!).
Quicksort
Wenn eine Methode schon Quicksort heißt, weckt das gewisse Ewartungen, und sie werden auch nicht enttäuscht: Quicksort ist in den meisten Fällen der schnellste Algorithmus. Was steckt dahinter?
Die Idee ist recht einfach: Man greift sich ein beliebiges Element des Arrays heraus – beispielsweise das mittlere – und teilt den Array in zwei Gruppen: Eine mit den Elementen, die größer sind als das herausgegriffene, und eine mit den kleineren (oder gleichen). Diese beiden Hälften übergibt man vertrauensvoll wiederum an Quicksort. Es handelt sich also um eine rekursive Funktion. Naja, und irgendwann sind die Arrays nur noch 1 Element groß und trivialerweise sortiert.
Um nun nicht immer neue Arrays erzeugen zu müssen, arbeitet Quicksort mit linker und rechter Grenze. Dafür müssen dann natürlich alle Elemente, die größer sind als das herausgegriffene, in den unteren Teil verschoben werden, die anderen in den oberen Teil. Darin besteht die eigentliche Arbeit von Quicksort:
procedure QSort(Links, Rechts : LongInt); var i, j : LongInt; x, w : Byte; begin i := Links; j := Rechts; x := Table[(Links + Rechts) div 2]; repeat while Table[i] < x do Inc(i); while Table[j] > x do Dec(j); if i <= j then begin w := Table[i]; Table[i] := Table[j]; Table[j] := w; Inc(i); Dec(j); end; until i > j; if Links < j then QSort(Links,j); if Rechts > i then QSort(i,Rechts); end;
In x wird zunächst das herausgegriffene Element gespeichert – in diesem Fall die Mitte. i und j sind Laufindizes, die zunächst links und rechts positioniert werden. Dann marschieren sie von beiden Seiten aufeinander zu, bis sie ein Element finden, das nicht auf ihre Seite gehört. Sollten sie sich zu diesem Zeitpunkt nicht schon überholt haben (in dem Fall würde es ja wieder stimmen), tauschen sie die beiden Elemente aus und machen weiter. Das wiederholt sich so lange, bis sich die beiden erreicht bzw. überholt haben.
Anschließend wird QSort rekursiv aufgerufen, einmal für den unteren Teil, falls ein solcher überhaupt mit mehr als einem Element existiert, einmal für den oberen Teil (dito). Da die Rekursion nicht in der innersten Schleife stattfindet, ist sie relativ harmlos, allerdings kann das natürlich schon etwas auf den Stack gehen. Daher wird manchmal eine iterative Implementation empfohlen, bei der man den Stack selbst verwaltet; besonders trivial ist das leider nicht.
Quicksort ist, wie eingangs gesagt, in der Regel das schnellste Suchverfahren. Im schlimmsten Fall jedoch, wenn das herausgegriffene x jedesmal das größte (oder kleinste) Element des Arrays ist, fällt Quicksort leider auf das Niveau von Bubblesort herab. In den meisten Situationen fällt das nicht ins Gewicht, aber in Echtzeitanwendungen muß man es schon beachten.
Heapsort
Heapsort ist ebenfalls ein sehr schneller Algorithmus, aber im Durchschnitt nicht ganz so schnell wie Quicksort. Dafür leistet es sich auch im schlimmsten Fall keinen solchen Durchhänger wie dieses, so daß sich Heapsort vor allem für Anwendungen empfiehlt, in denen Höchstzeiten eingehalten werden müssen.
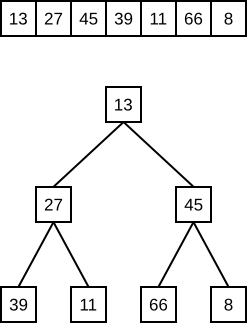
Die Funktionsweise ist leider nicht ganz trivial (finde ich). Man hat sich vorzustellen, daß die Elemente des Arrays tatsächlich in einem binären Baum gespeichert sind (näheres zu Bäumen findet sich übrigens auf meiner Seite über dynamische Datenstrukturen). Aber keine Angst, es kommt jetzt nicht die für binäre Bäume übliche Pointer-Orgie, denn es gibt einen Trick, mit dem man (ausgeglichene) binäre Bäume direkt im Array darstellen kann. Dazu stellen wir uns erstmal vor, Element 1 des Arrays sei die Wurzel des Baums. Und weiter gilt: Jedes Element des Arrays, z. B. i, ist ein Knoten des Baumes, und seine beiden Nachfolger sind die Elemente 2 · i und 2 · i + 1. Die folgende Abbildung verdeutlicht, wie die Knoten im Array liegen:
Einen solchen Baum nennt man einen "Heap" (engl. heap = Haufen), wenn jeder Knoten größer ist als seine Nachfolger. Die hintere Hälfte des Arrays – egal, in welchem Zustand er sich befindet – ist immer ein Heap, weil die Knoten ja gar keine Nachfolger mehr haben. Wenn der hintere Teil des Arrays (Hälfte oder mehr) ein Heap ist, kann ich diesen um ein Element nach vorne erweitern. Damit das Ergebnis immer noch ein Heap ist, muß ich das Element am neuen Knoten allerdings im Baum "absinken" lassen (engl. to sift = sieben), wobei es immer mit dem größeren seiner Nachfolgeknoten vertauscht wird – so lange, bis beide Nachfolgeknoten kleiner sind.
Dieser Vorgang wird von der Prozedur Sift erledigt; wir werden ihn noch öfter brauchen:
procedure Sift(L, R : LongInt); var i, j : LongInt; x : Byte; begin i := L; j := 2 * L; x := Table[i]; if (j < R) and (Table[j + 1] > Table[j]) then Inc(j); while (j <= R) and (Table[j] > x) do begin Table[i] := Table[j]; i := j; j := j * 2; if (j < R) and (Table[j + 1] > Table[j]) then Inc(j); end; Table[i] := x; end;
Wie man sieht, bekommt Sift eine linke Grenze, dort fängt es an, und eine rechte Grenze, an der es aufhört – auch wenn der Array vielleicht noch weiterginge (es ist jetzt noch etwas unklar, wozu das gut sein soll: Geduld!). In x wird der Wert des zu "siftenden" Elements gespeichert, i ist der aktuelle Knoten und j der Nachfolgeknoten – entweder 2 · i oder, wenn größer, 2 · i + 1.
Der erste Teil von Heapsort besteht genau darin, wie beschrieben von der Hälfte ausgehend den Heap nach vorne zu erweitern, bis der ganze Array ein Heap ist. Der zweite Teil, das eigentliche Sortieren, ist nun eigentlich auch nicht mehr schwer zu verstehen: Das erste Element des Arrays ist, weil es die Wurzel eines Heaps ist, das größte Element. Es gehört also ans Ende des Arrays. Setzen wir es doch einfach dorthin, indem wir es mit dem dortigen Element austauschen. Dieses ist nun an Position 1. Wir lassen es mit Hilfe von Sift einsinken – natürlich nur bis zum vorletzten Element, das letzte wollen wir in Ruhe lassen – und haben anschließend wieder das Maximum an Position 1 (weil die Knoten der zweiten Ebene ja auch die Maxima ihrer Unterheaps sind). Dieses vertauschen wir nun mit dem Element an vorletzter Stelle, lassen die neue Nummer 1 einsinken usw. usf. Wenn wir den ganzen Array besetzt haben, sind wir fertig, und weil der Array von unten her mit den jeweils größten Elementen aufgefüllt wurde, ist er sortiert – voilà!
Der Heapsort-Algorithmus in Pascal, die beiden Teile sind durch eine Leerzeile getrennt:
procedure HSort; var L, R : LongInt; Index : LongInt; x : Byte; begin L := (TableSize div 2) + 1; R := TableSize; while (L > 1) do begin Dec(L); Sift(L,R); end; for Index := R downto 1 do begin x := Table[1]; Table[1] := Table[Index]; Table[Index] := x; Sift(1,Index - 1); end; end;
Nun wird auch deutlich, warum Sift auch eine rechte Grenze mitbekommt. Eine mögliche Verbesserung besteht darin, daß man den Code von Sift gleich direkt in den Heapsort-Algorithmus schreibt. Dies sollte kein großes Problem sein, nur mit den Variablennamen muß man ein bißchen aufpassen.
Ganz schön viel Aufwand für einen Sortieralgorithmus, könnte man sagen. Andererseits ist es halb so schlimm, wenn man es einmal verstanden hat. Und der Trick mit dem Unterbringen von binären Bäumen in Arrays ist ja auch etwas, das man sich merken kann.
Bucketsort
Hörte es sich bis jetzt so an, als wären Quicksort und Heapsort die schnellsten Suchverfahren, so wirkt es vielleicht verwunderlich, aber das eher selten anzutreffende Bucketsort verspricht, noch schneller zu sein. Die Sache hat – natürlich – einen Haken: Bucketsort benötigt zusätzlichen Platz. Und zwar umso mehr, je größer die Menge der möglichen Schlüssel ist. Warum das so ist, wird gleich deutlich.
Das Prinzip ist einfach: In einem zusätzlichen Array namens Bucket gibt es für jeden möglichen Schlüssel ein "Fach". Dann wird der Array Table von vorn bis hinten durchgegangen, und jedes Element wird in sein Fach gelegt. Anschließend braucht man nur noch den Inhalt er Fächer nacheinander zurück in den Array zu kopieren; dabei sollten die Fächer natürlich in der richtigen Reihenfolge sein. Anschließend ist der Array sortiert.
Leider ergibt sich eine Reihe von Problemen: Wie z. B. speichere ich mehrere Elemente in einem Feld des Bucket-Arrays? Diese Elemente müssen ja nicht unbedingt gleich sein, sie haben nur den gleichen Sortierschlüssel! Hierfür gibt es verschiedene Lösungen, aber die naheliegendste ist, eine linked List zu verwenden.
Zum anderen möchte man häufig Strings sortieren, aber selbst von Strings der Länge 10 gibt es 2610 = 1.411671 · 1014 Möglichkeiten. Von Standard-Strings der Länge 255 will ich mal lieber gar nicht anfangen... Auch das Sortieren von LongInts mit ihren 32 Bit Länge dürfte wenig spaßig sein. Ein Ausweg besteht darin, den Schlüssel in seine Einzelelemente aufzuteilen und mehrmals zu sortieren; bei Strings wird also zuerst nach dem letzten Zeichen sortiert, dann nach dem vorletzten usw. Bei Zahlen kann man entsprechend nach einzelnen Bits sortieren.
Um den Algorithmus zu verdeutlichen, will ich aber ein viel simpleres Beispiel nehmen: Es werden Bytes sortiert, der Bereich, innerhalb dessen sie Werte annehmen dürfen, ist also 0 bis 255. Eine starke Vereinfachung besteht darin, daß die Zahlen nur aus dem Schlüssel bestehen können, und zwei Elemente mit dem gleichen Schlüssel nicht unterscheidbar sind. Daher brauchen sie nicht in den Fächern gespeichert zu werden – der Index des Faches ist schon der Wert, und im Fach wird einfach gezählt, wie oft die betreffende Zahl schon aufgetreten ist. So oft wird sie dann beim Zurückschreiben in den Array wiederholt.
Und so sieht die Prozedur aus:
procedure BuckSort; var Index : LongInt; BuckIndex : LongInt; begin for BuckIndex := 0 to 255 do Bucket[BuckIndex] := 0; for Index := 1 to TableSize do Inc(Bucket[Table[Index]]); Index := 1; BuckIndex := 0; while Index <= TableSize do begin while Bucket[BuckIndex] = 0 do Inc(BuckIndex); Table[Index] := BuckIndex; Dec(Bucket[BuckIndex]); Inc(Index); end; end;
In dieser Version ist Bucketsort ziemlich schnell. Eine andere Anwendung, in der es glänzt, ist z. B. das Sortieren von Strings nach Anfangsbuchstaben. Insgesamt jedoch fordert der Geschwindigkeitsvorteil seinen Tribut in Form von allerlei Umständlichkeiten, die einem mit Quicksort und Heapsort erspart bleiben. Das ist auch der Grund dafür, daß Bucketsort zumeist nur in Spezialfällen angewendet wird.
Praktischer Einsatz
In den vorangegangenen Abschnitten befanden sich die Algorithmen immer in einer sehr "sterilen" Umgebung, um sie von allem Beiwerk, das nicht unmittelbar zum Algorithmus gehört, zu befreien. In der Praxis sieht das natürlich anders aus. Einige der interessanteren Aspekte des praktischen Einsatzes beleuchtet dieser Abschnitt.
Programmierung von wiederverwendbaren Suchfunktionen
Wenn man häufiger Suchverfahren einsetzt, hat man es mit unterschiedlichsten Bedingungen zu tun: Mal möchte man Strings sortieren, mal Zahlen, ein anderes Mal vielleicht geometrische Figuren nach ihrem Umfang. Auch wünscht man sich manchmal, die Sortierreihenfolge (auf- oder absteigend) angeben zu können – wenngleich das Umdrehen eines Arrays eher zu den leichteren Übungen gehören dürfte...
In all diesen Fällen muß man den Suchalgorithmus, wenn er so abgefaßt ist wie in den Beispielen in Abschnitt 3, jedesmal neu schreiben. Besser wäre es, eine allgemeine Sortierprozedur zu schreiben, die jeden Arrays sortiert. Dabei ergeben sich zwei wichtige Probleme:
Die Prozedur muß den Array als Parameter annehmen.
Zum einen stellt sich die Frage: Array of was? Die Suchfunktion soll ja unterschiedliche Arten von Elementen sortieren können. Daher wollen wir zunächst mal festlegen, daß der Array nur Zeiger auf die eigentlichen Elemente enthält.
Ein anderer Aspekt ist weitaus problematischer: Wie lang ist der Array? Dies vorher festzulegen könnte die große Einschränkung, oder auch die größte Verschwendung der Suchfunktion werden. Das Problem, daß in Pascal die Länge des Arrays Teil seines Typs ist, ist nicht neu. In dem (übrigens lesenswerten) Buch "Software Tools in Pascal" schreiben Kernighan und Plauger:
Pascal in its pure form has a number of defects that make it hard to write programs well. The worst problem, at least from our perspective, is that the size of an array is part of its type, and so it is not possible to write general-purpose functions and procedures that will process arrays of different sizes at different times.
Aus diesem Grund gibt es (eigentlich sogar schon ziemlich lange) sogenannte Conformant Array Parameter, die für beliebig lange Arrays stehen. Eine Variante dieses Konzeptes sind die in Delphi und Free Pascal implementierten Open Array Parameter, die stets bei 0 anfangen, und deren höchstes Element mit der Funktion High(Array) ermittelt werden kann. Diese Form wird in meinem Beispiel verwendet.
Die Prozedur muß unbekannte Typen vergleichen können.
Die Prozedur muß ja eine Funktion besitzen, die ihr zu zwei Elementen des Arrays sagt, in welche Reihenfolge sie gehören, genauer: Ein Prädikat, daß ihr zu zwei Argumenten feststellt, ob das erste vor das zweite soll oder nicht. Der <-Operator von Pascal funktioniert ja praktischerweise auf Strings ebenso wie auf Zahlen, aber wenn der Schlüssel Teil eines Records ist, nützt das wenig. Die Funktion muß daher auch eine solche Funktion als Paramater nehmen.
Auch hierfür gibt es unterschiedliche Modelle, wobei das von Borland ausnahmsweise mal besser ist als der Standard – Borland hat richtige "prozedurale Typen" eingeführt. Die ursprüngliche Wirth'sche Methode hätte in diesem Fall schon gereicht, wird aber leider in Free Pascal und in den Borland-Compilern nicht unterstützt. Daher deklarieren wir:
type TOrderFunc = Function(Arg1, Arg2 : Pointer) : Boolean;
Eine solche Funktion nimmt zwei Elemente und vergleicht sie. Ist Arg1 kleiner als Arg2, wird True zurückgegeben, ansonsten False. Zu beachten ist hier noch ein kleiner Syntax-Unterschied zwischen FPC und TP/BP: Bei Free Pascal muß beim Referenzieren der Funktion noch ein @ vor den Namen gestellt werden, da andernfalls angenommen wird, man wollte die Funktion aufrufen (auf Wunsch, d. h. per Kommandozeilen-Parameter, wird FPC Borland-kompatibel).
Es stellt sich nun nur noch die Frage, welcher Algorithmus zum Einsatz kommen soll. Als bester Algorithmus für allgemeine Zwecke, insbesondere in Fällen, wo Arrays auch mal recht groß werden können (über die Größe wissen wir ja nichts), darf Quicksort gelten. Der verwendete Qicksort-Algorithmus entspricht genau dem in 3.5 beschriebenen. Insgesamt sieht die Prozedur nun folgendermaßen aus:
procedure ArrSort(var Table : Array of Pointer; SmallerThan : TOrderFunc); procedure QSort(L, R : LongInt); var i, j : LongInt; x, w : Pointer; begin i := L; j := R; x := Table[(L + R) div 2]; repeat while SmallerThan(Table[i],x) do Inc(i); while SmallerThan(x,Table[j]) do Dec(j); if i <= j then begin w := Table[i]; Table[i] := Table[j]; Table[j] := w; Inc(i); Dec(j); end; until i > j; if L < j then QSort(L,j); if R > i then QSort(i,R); end; begin QSort(0,High(Table)); end;
Damit kann man nun alles sortieren, was man will; man muß sich nur die Mühe machen, für alle Elemente Pointer zu haben. Entweder verwaltet man die Elemente dynamisch, oder man legt sie in einem Array ab und setzt dann in einem zweiten Array gleicher Länge in jede Zelle i einen Pointer auf Element i des ursprünglichen Arrays.
Eine Sortier-Unit sowie ein Demoprogramm, welches die Unit benutzt, sind in den folgenden beiden Dateien zu finden:
Effizientes Sortieren von Strings mit Bucketsort
Die unter 3.7. beschriebene Version von Bucketsort ist von eher akademischen Nutzen. Während die Tatsache, daß in den Beispielen nur Zahlen sortiert werden, bei den anderen Algorithmen nicht weiter stört, weil man sie leicht auf andere Typen umstellen kann, geht dies bei Bucketsort leider nicht so einfach. In diesem Abschnitt wird an einem Beispiel gezeigt, wie Bucketsort mit Daten umgeht, die nicht nur aus ihren Schlüsseln bestehen. Gleichzeitig wird der im gleichen Abschnitt erwähnte Trick demonstriert, Strings in mehreren Durchgängen zu sortieren.
Um mehrere Elemente in einem Bucket abzulegen, gibt es verschiedene Möglichkeiten. Hier habe ich mich für die Verwendung dynamischen Speichers in Form einer Linked List entschieden. Die Elemente müssen aus dem Bucket in der gleichen Reihenfolge herausgeholt werden, in der sie auch hereingekommen sind – eine klassiche Warteschlange. Da lag es nahe, meine Queue-Unit in die Pflicht zu nehmen. Genauere Informationen über diese Unit sind auf dieser Seite zu finden; für dieses Beispiel reicht es aber auch, folgendes zu wissen:
Die Elemente, die in der Queue gespeichert werden, sind Pointer. Die Strings müssen also, entweder grundsätzlich oder ad hoc in der Sortierprozedur, in dynamischem Speicher aufbewahrt werden. Die Unit Queue stellt einen Typen TQueue bereit, sowie die Aufrufe Enqueue (Einfügen eines Elementes), Dequeue (Herausholen) und IsEmpty (True, wenn die Queue leer ist, False sonst).
Die Methode, ganze Strings mit nur 26 Fächern zu sortieren, wurde schon in 3.7. beschrieben: Zuerst werden sie nach dem letzten Zeichen sortiert, dann nach dem vorletzten usw. Das geht natürlich nur gut, wenn der Algorithmus die Reihenfolge von Elementen mit dem gleichen Schlüssel beibehält (man sagt dann, er ist "stabil"), was Bucketsort auch tut. Weiterhin ist wichtig, daß alle Strings gleich lang sind. Folgende Deklarationen werden gebraucht:
const StrMax = 8; type PSortStr = ^TSortStr; TSortStr = String[StrMax]; var Table : Array[1..TableSize] of TSortStr; Bucket : Array['a'..'z'] of TQueue;
Damit sieht die Sortierprozedur dann so aus:
procedure SBuckSort; var Run : LongInt; Index : LongInt; SortStr : PSortStr; c : Char; begin for Run := StrMax downto 1 do begin for Index := 1 to TableSize do begin New(SortStr); SortStr^ := Table[Index]; Enqueue(Bucket[Table[Index][Run]],SortStr); end; c := 'a'; for Index := 1 to TableSize do begin while IsEmpty(Bucket[c]) do Inc(c); SortStr := Dequeue(Bucket[c]); Table[Index] := SortStr^; Dispose(SortStr); end; end; end;
Beeindruckend, wie sehr es immer noch der Ursprungsversion ähnelt. Statt des Inc und Dec auf dem Bucket haben wir jetzt Enqueue und Dequeue, und die Prüfung, ob der Bucket 0 sei, wird durch IsEmpty ersetzt.
Das vollständige Programm findet sich in der Datei strbucksort.pas; die Queue-Unit in queue.pas.